(UroToday.com) The 2022 American Urological Association (AUA) Annual Meeting included the Society of Urologic Oncology (SUO) session and a presentation by Ahmed Ghazi discussing simulation and 3D printing in urologic oncology. Dr. Ghazi started his presentation by highlighting that the goals for surgical simulation include:
- Basic skill simulation
- Procedural skill simulation
- Crisis management simulation
- Patient specific simulation
Current procedural training platforms include virtual reality, cadavers and animals. The ideal surgical simulator according to Dr. Ghazi would be as follows:
Dr. Ghazi notes that 3D printing in his opinion represents the 4th industrial revolution. His lab has been at the forefront of injection modeling and registration. For example, with regards to developing kidney models, this includes making a mold of the kidney, injection fluid to simulate blood, completing the model kidney, and then housing this model in a simulated body allowing for robotic simulation of a partial nephrectomy. Patient specific simulation allows Dr. Ghazi’s group to generate an exact replica of a patient’s vasculature, tumor, and anatomy, allowing the surgeon to perform the exact operation on a model kidney ~48 hours prior to the real-life partial nephrectomy:
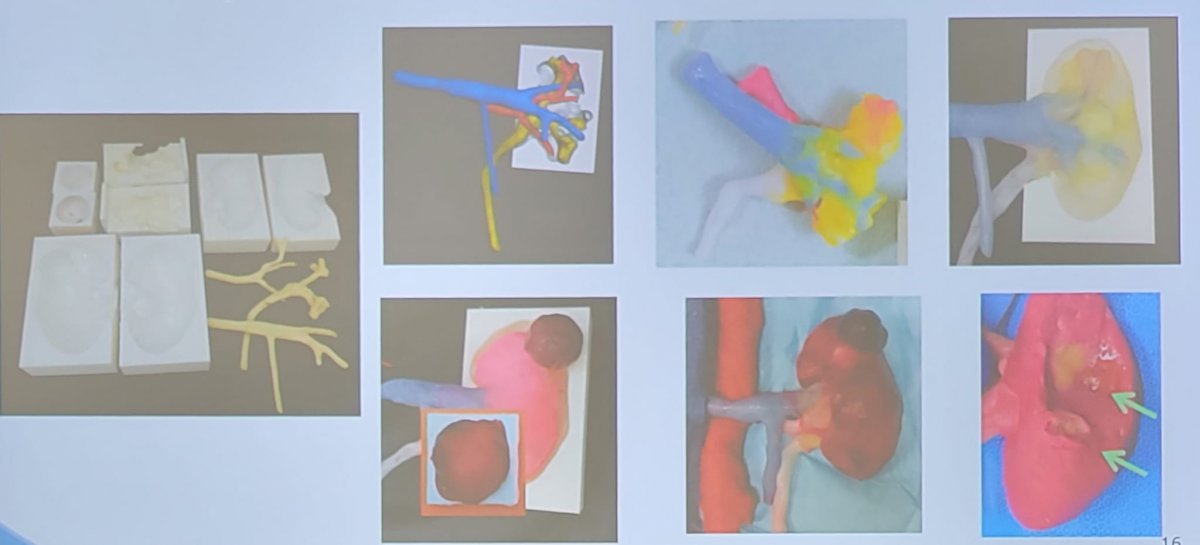
Dr. Ghazi’s group previously published their experience of mechanical and functional testing data as evidence for utilizing a perfused hydrogel kidney model created utilizing 3D printed injection casts for robotic partial nephrectomy simulation and training [1]. To do this, anatomically correct, tumor-laden kidney models were created from 3D-printed casts designed from a patient's CT scan and injected with poly-vinyl alcohol. They found that 7% poly-vinyl alcohol at three freeze-thaw cycles (7%-3FT) was found to be the formula that best replicates the mechanical properties of fresh porcine kidney tissue.
Subsequently, Dr. Ghazi’s group recently published their assessment analyzing the accuracy of 3D-printing and modeling to create patient-specific rehearsals for robotic partial nephrectomy [2]. They found that geometries of the robotic partial nephrectomy parenchyma, tumor, artery, vein, and pelvicalyceal system lay within an average deviation of 2.5 mm (Dice similarity coefficient = 0.70) of the original patient geometry and 5 mm (Dice similarity coefficient = 0.45) of the original patient alignment. As follows are representative images of surgery on a model kidney and the subsequent live surgery.
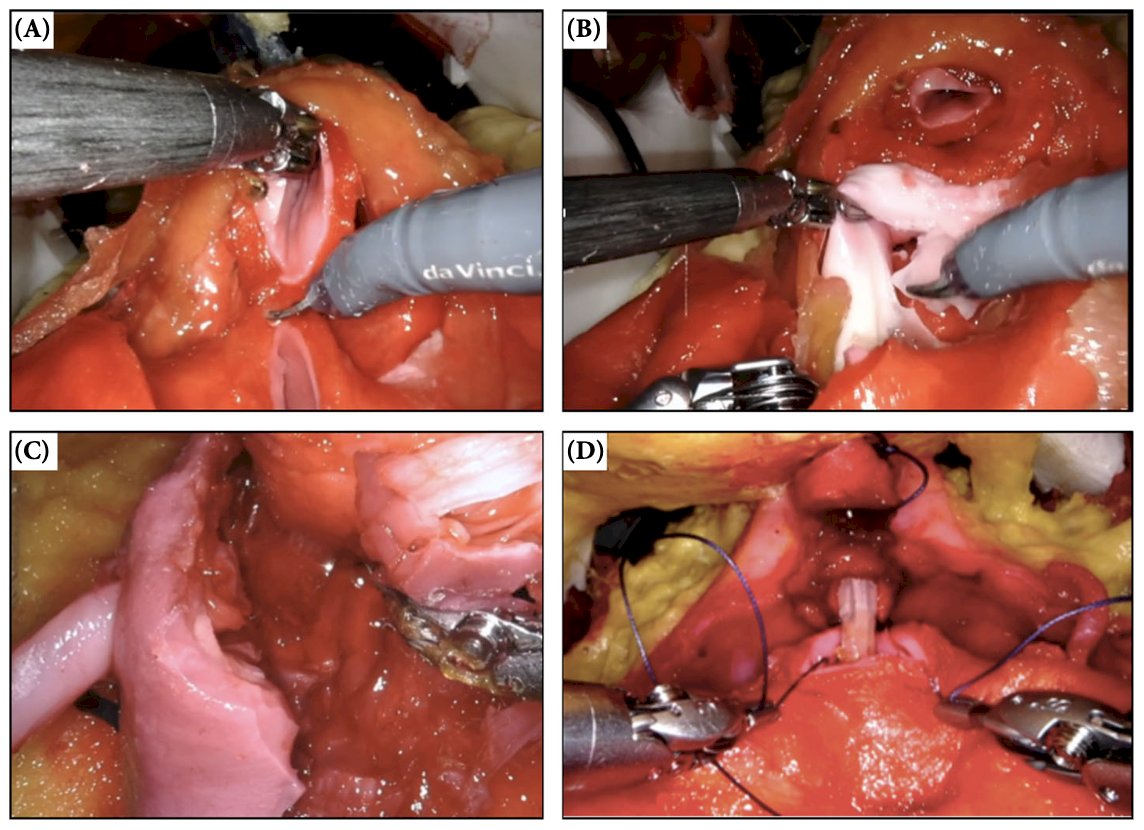
Dr. Ghazi’s group is also applying these same simulation principles to modeling of prostates/bladders for simulation of robotic prostatectomy. Dr. Ghazi concluded his presentation by highlighting objective measures of performance, namely clinically relevant objective metrics of simulation (CROMS). In their 2020 study, they sought to incorporate and validate clinically relevant performance metrics of simulation (CRPMS) into a hydrogel model for nerve-sparing robot-assisted radical prostatectomy [3]. To do this, anatomically accurate models of the human pelvis, bladder, prostate, urethra, neurovascular bundle and relevant adjacent structures were created from patient MRI by injecting polyvinyl alcohol hydrogels into three-dimensionally printed injection molds. The following steps of a nerve-sparing robot-assisted radical prostatectomy were simulated: bladder neck dissection, seminal vesicle mobilization, neurovascular bundle dissection, and urethrovesical anastomosis:
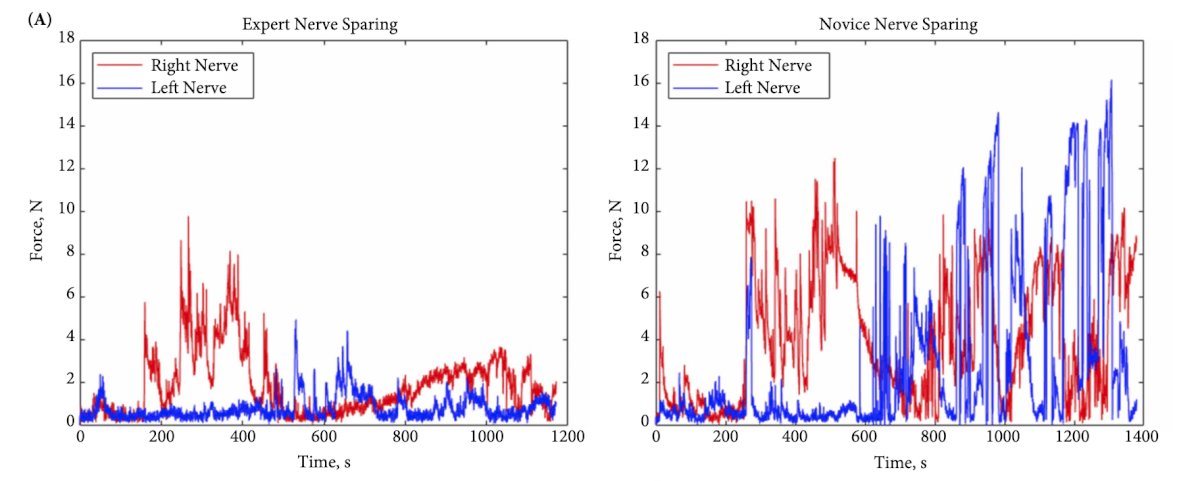
Subsequently, 5 experts (>500 cases) and nine novice surgeons (<50 cases) completed the simulation exercise. Overall, the expert group achieved faster task-specific times for nerve-sparing (p = 0.007) and superior surgical margin results (p = 0.011). Nerve forces applied were significantly lower for the expert group with regard to maximum force (p = 0.011), average force (p = 0.011), peak frequency (p = 0.027) and total energy (p = 0.003). Higher force sensitivity (subcategory of Global Evaluative Assessment of Robotic Skills (GEARS) score) and total GEARS score correlated with lower nerve forces applied to neurovascular bundle during the simulation with a correlation coefficient (r value) of -0.66 (p = 0.019) and -0.87 (p < 0.0001), respectively:
Both total and force sensitivity GEARS scores were significantly higher in the expert group compared to the novice group (P = 0.003). Furthermore, urethrovesical anastomosis leak rate highly correlated with total Robotic Anastomosis Competency Evaluation (RACE)
score r value = -0.86 (p < 0.0001). These results suggested that correlation of validated objective metrics (GEARS and RACE) with CRPMS suggests their timely application as a novel method for real-time assessment and feedback during robotic surgery training.
Presented by: Ahmed E. Ghazi, Department of Urology, University of Rochester Medical Center, Rochester, NY
Written by: Zachary Klaassen, MD, MSc – Urologic Oncologist, Assistant Professor of Urology, Georgia Cancer Center, Augusta University/Medical College of Georgia, @zklaassen_md on Twitter during the 2022 American Urological Association (AUA) Annual Meeting, New Orleans, LA, Fri, May 13 – Mon, May 16, 2022.
References:
- Melnyk R, Ezzat B, Belfast E, et al. Mechanical and functional validation of a perfused, robot-assisted partial nephrectomy simulation platform using a combination of 3D printing and hydrogel casting. World J Urol. 2020 Jul;38(7):1631-1641.
- Melnyk R, Oppenheimer D, Ghazi AE. How specific are patient-specific simulation? Analyzing the accuracy of 3D-printing and modeling to create patient-specific rehearsals for complex urological procedures. World J Urol. 2022 Mar;40(3):621-626.
- Witthaus MW, Farooq S, Melnyk R, et al. Incorporation and validation of clinically relevant performance metrics of simulation (CRPMS) into a novel full-immersion simulation platform for nerve-sparing robot-assisted radical prostatectomy (NS-RARP) utilizing three-dimensional printing and hydrogel casting technology. BJU Int. 2020 Feb;125(2):322-332.