The new HUGO RAS System consists of one System Tower with a Valleylab Electrosurgical Generator, four independent arm carts, and an open console. The console has innovative hand controllers with a “pistol-like” design, a head-tracking system able to recognize surgeon vision through specific 3-D glasses with reflective markers, and it is provided with an interactive display where different rotation multiplier and motion scaling settings can be customized by the surgeon. The wristed robotic instruments have a full seven degrees of freedom range of motion, and endoscopic vision is provided by a Karl Storz 3D Tipcam S laparoscopic camera enclosed in a dedicated robotic adaptor. All components of the surgical team received an official technical training.
We analyzed data of 5 patients who received RARP ± extended pelvic lymph-node dissection (ePLND) at OLV hospital (Aalst, Belgium) between February 1st and 9th, 2022. ePLND was performed in men with a preoperative risk for nodal involvement ≥5%.4
Patients were positioned supine with the bed flat at 0°. One eleven-mm endoscope port was placed on the midline above the umbilicus, approximately 16 cm far from the pubic bone. Other three eight-mm robotic ports were placed under vision on a transversal line, 5 cm below the optic port. This configuration allows the surgeon to work closer to the target anatomy compared to endoscope port. Robotic ports were placed at least 8 cm between each other, and 2 cm away from bony prominences. Finally, one five-mm laparoscopic trocar and one twelve-mm AirSeal port were positioned in the right hemi-abdomen. This setup has been investigated in order to optimize working space in the operative room, with three arm carts coming from the left of the operative bed, table assistant working on the right side of the patient, and energy tower at the back of the assistant (Figure 1). The scrub nurse worked on the left side of the patient, having easy access to the left robotic arms.
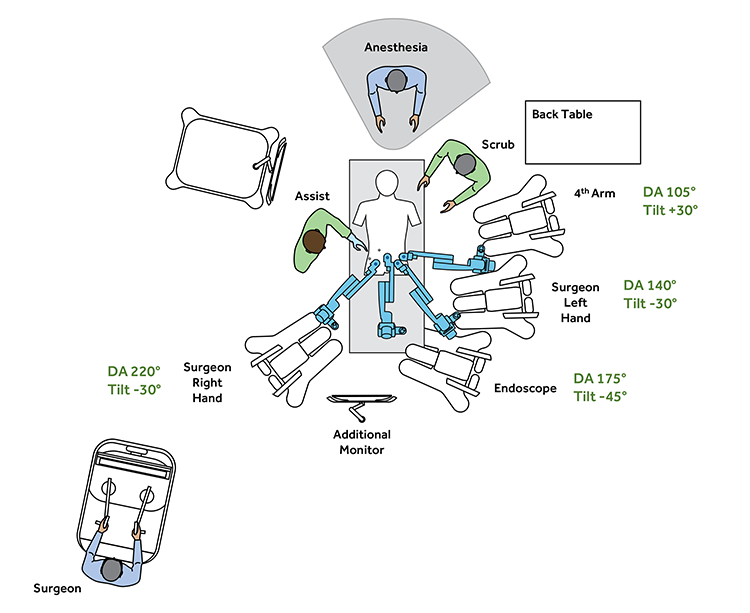
Figure 1. Setting of the operative room for robot-assisted radical prostatectomy using the new HUGO RAS system.
Since the HUGO RAS system has independent arm carts, a step-by-step docking procedure is encouraged in order to reduce docking time. Endoscope arm cart is docked first, located most distally on the left side on the operative bed (Figure 2). During the positioning of this first robotic arm, collisions with the operative bed may occur: in order to reach the adequate docking and tilting angle, it is possible to slightly increase the angle between legs and upper body (i.e. lower the legs), increasing the available space above the lower part of the operative bed. The adjacent two arm carts on the left are then docked, whereas surgeon's right hand cart is docked from the right side of the patient. A key feature of the system is the modularity that allows for different tilt and docking angles in order to optimize the access to the surgical field. In our setting, docking and tilt angles were: endoscope: 175°, minus 45°; surgeon left hand: 140°, minus 30°; surgeon right hand: 225°, minus 30°; fourth arm: 105°, plus 30°.
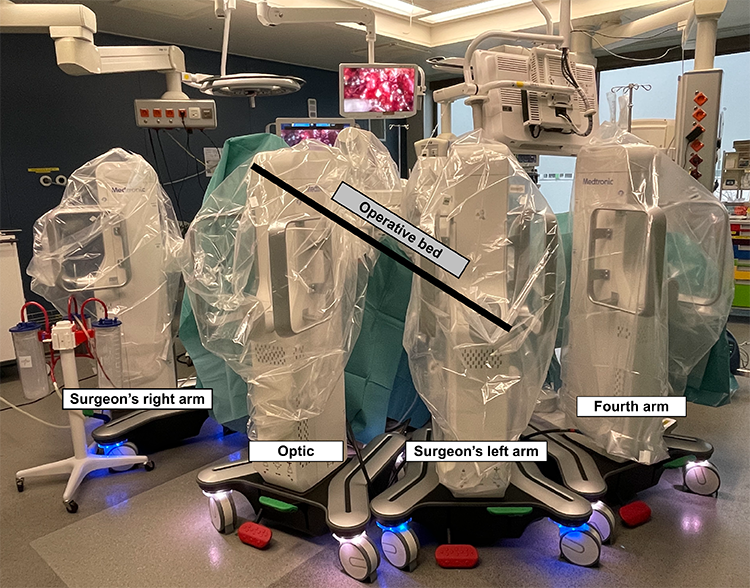
Figure 2. Arm carts disposition in the operative room during robot-assisted radical prostatectomy using the new HUGO RAS system.
RARP was performed with a trans-peritoneal, anterior approach following validated steps and metrics.5,6 Monopolar curved shears, bipolar fenestrated grasper, and large needle driver were used in a three-instrument configuration. The urethral catheter was removed on postoperative day 2.7
Median (interquartile range [IQR]) age and Body Mass Index was 64 (57, 65) years and 26 (26, 27), respectively. Median (IQR) preoperative PSA level was 6.0 (5.0, 7.8) ng/ml. One (20%) patient had International Society of Urologic Pathology (ISUP) group 3 tumor on prostate biopsy, whereas all the others had ISUP group ≤2.
All the twelve validated steps of the procedure were completed, with no need for conversion or for additional port placement. Two patients received ePLND. No intraoperative complication was recorded. Median (IQR) operative and console time were 170 (140, 180) and 120 (110, 150) minutes, respectively. The system did not have technical failures that compromised the completion of the surgery. We had few minor problems with the machine, that needed a rebooting between two procedures, and with a non-responsive instrument that needed to be unplugged/replugged (the same instrument). Median (IQR) estimated blood loss was 400 (400, 700) ml. After surgery, one patient experienced an acute urinary retention that was treated with re-catheterization (Clavien-Dindo 2). Median length of stay was 3 days (IQR: 2-4).
In this clinical investigation, we demonstrated the feasibility and safety of RARP using the novel HUGO RAS system. We described an ideal configuration for this new robotic platform, a setup that resulted in no intraoperative complications or system failures.
One of the main advantages of this new robotic platform is represented by its independent arm carts. This allows for a wide variety of surgical configurations that may comply with different practices and uses. For instance, our setting, with three carts located on the left and one cart on the right of the operative bed, grants adequate working space for the assistant, who is positioned on the right of the patient in our practice. Similarly, other surgical teams may identify different configurations that might be compelling for their practice (e.g. based on the position of table assistant and scrub nurse). This may also be influenced by other factors such as working space (i.e. dimensions and/or configuration of the operative theatre), surgeon’s preference (i.e. right- or left-handed) or surgical indication (i.e. multi-quadrant surgery; gynecologic procedures that may require a third scrubbed assistant between the legs of the patient). For these reasons and to better understand the system and its capabilities, we believe that great attention should be paid to preliminary technical training, focused on basic device and docking angles description. In fact, before the first-in-human procedure, our team practiced in dry lab and wet lab and tested the best operative set-up on human cadaver.
Among other interesting features, the system tower and its visualization system are designed to support both robot-assisted surgery and traditional laparoscopy. Besides the obvious advantages in cases requiring conversion, this feature might accommodate the practice of surgeons performing procedures using both surgical techniques. Also, in the case of multi-quadrant surgery, it is possible to change working angle without changing port configuration, with significant improvements as per how to reach different target anatomies. With regards to the surgeon console, the "pistol" grip handles allow instruments movements with the thumb and index finger, while the pistol's trigger represents the clutch function. Interestingly, wrist rotation can be electronically-enhanced through a multiplier (up to x2), with a rotation range of 520 degrees that may facilitate the surgeon, especially during suturing. Finally, the open surgical console improves team communication and allows observers (e.g. trainees) to follow the operation.
With respect to possible disadvantages of this new platform, one may argue that docking process for multiple arm carts might be time-consuming. However, for a properly trained surgical team, turning on the system and docking the arms were simple and quick processes. During dry lab sessions, our team was able to accomplish this in less than two minutes. In clinical practice, few tips may speed up the docking process: for example, hanging a reference table with docking angles in the operative theatre or, once the arm carts disposition is optimized, mark it on the ground for easier (and faster) repositioning during subsequent surgeries.
In conclusion, we described the first report of a robot-assisted radical prostatectomy executed with the HUGO RAS system in Europe. Starting up the system and docking the robotic arms were straightforward processes for a properly trained surgical team, and experienced surgeons were able to complete the surgery within a surgical time in line with the literature. Awaiting future investigations on oncologic and functional outcomes, this study provides relevant data that may be of help for future adaptors of this surgical platform. ILLUSTRATIONS LEGEND
Written by: Carlo A. Bravi1,2,3 Marco Paciotti1,2,4 Luca Sarchi1,2 Angelo Mottaran1,2,5 Luigi Nocera1,2,3 Rui Farinha2 Pieter De Backer2 Marie-Helene Vinckier1,2 Geert De Naeyer1,2 Frederiek D’Hondt1,2 Ruben De Groote1,2 Alexandre Mottrie1,2
- Department of Urology, Onze-Lieve-Vrouwziekenhuis Hospital, Aalst, Belgium
- ORSI Academy, Ghent, Belgium
- Division of Oncology/Unit of Urology; URI; IRCCS Ospedale San Raffaele, Milan, Italy
- Department of Urology, Humanitas Research Hospital, IRCCS, Rozzano, Milan, Italy
- Division of Urology, IRCCS Azienda Ospedaliero-Universitaria di Bologna, Bologna, Italy
References:
- Falagario U, Veccia A, Weprin S, et al. Robotic-assisted surgery for the treatment of urologic cancers: recent advances. Expert Review of Medical Devices. 2020;0(0):1. doi:10.1080/17434440.2020.1762487.
- Farinha R, Puliatti S, Mazzone E, et al. Potential contenders for the Leadership in Robotic Surgery. Journal of Endourology. October 2021. doi:https://doi.org/10.1089/end.2021.0321.
- Bravi CA, Paciotti M, Sarchi L, et al. Robot-assisted Radical Prostatectomy with the Novel Hugo Robotic System: Initial Experience and Optimal Surgical Set-up at a Tertiary Referral Robotic Center. European Urology. May 2022:1-5. doi:10.1016/j.eururo.2022.04.029.
- Gandaglia G, Fossati N, Zaffuto E, et al. Development and Internal Validation of a Novel Model to Identify the Candidates for Extended Pelvic Lymph Node Dissection in Prostate Cancer. European Urology. 2017;72(4):1-9. doi:10.1016/j.eururo.2017.03.049.
- Martini A, Falagario UG, Villers A, et al. Contemporary Techniques of Prostate Dissection for Robot-assisted Prostatectomy. European Urology. 2020;78(4):583-591. doi:10.1016/j.eururo.2020.07.017.
- Mottrie A, Mazzone E, Wiklund P, et al. Objective assessment of intraoperative skills for robot-assisted radical prostatectomy (RARP): results from the ERUS Scientific and Educational Working Groups Metrics Initiative. BJU Int. 2021;128(1):103-111. doi:10.1111/bju.15311.
- Develtere D, Rosiello G, Piazza P, et al. Early Catheter Removal on Postoperative Day 2 After Robot-assisted Radical Prostatectomy: Updated Real-life Experience with the Aalst Technique. European Urology Focus. October 2021. doi:10.1016/j.euf.2021.10.003.
Read the Abstract