(UroToday.com) The Friday afternoon plenary session opened with the prestigious John K. Lattimer Lecture, one of the AUA’s most prestigious lectureships honoring Dr. John K. Lattimer, a pioneering urologist recognized for his major contributions to urology, medical education, and innovation in surgical techniques. The lecture traditionally highlights transformative ideas and future directions in urologic surgery and science.
This year, the lecture was delivered by Dr. Jeremy Teoh from The Chinese University of Hong Kong, Hong Kong, on the topic “Transurethral Robotic En-bloc TURBT- Challenging the Status Quo.” The presentation focused on the evolution of bladder tumor resection, the limitations of conventional TURBT, and the emerging role of robotic-assisted endoscopic surgery.
Dr. Teoh began by addressing the historical challenges of conventional transurethral resection of bladder tumor (TURBT), particularly the persistently high recurrence rates associated with non–muscle-invasive bladder cancer (NMIBC). He emphasized that although conventional TURBT remains the gold standard, piecemeal tumor resection can lead to specimen fragmentation, difficulty in pathological interpretation, incomplete staging, and potential tumor cell scattering.
The lecture then transitioned into the principles of en-bloc TURBT, highlighting its oncologic rationale and growing body of evidence. Dr. Teoh discussed how en-bloc resection allows removal of the tumor in a single intact specimen, improving orientation for pathological assessment and increasing the likelihood of adequate detrusor muscle sampling. He reviewed data demonstrating improved specimen quality and favorable oncologic outcomes associated with en-bloc techniques. However, despite strong supporting evidence, he acknowledged that widespread adoption remains limited due to technical complexity, especially in tumors located at difficult angles or challenging anatomical locations.
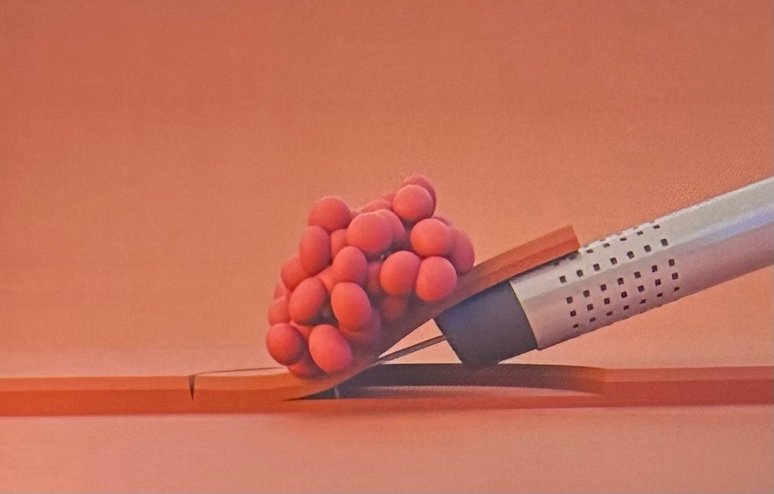
Dr. Teoh then presented the development of the robotic-assisted platform, which was engineered to overcome many of the technical limitations encountered during conventional en-bloc resection. The system incorporates miniature robotic arms capable of dynamic tissue traction and controlled tumor manipulation while maintaining continuous endoscopic visualization throughout the procedure. He demonstrated how the compact robotic platform could be docked directly to the patient side and integrated into the standard transurethral setup without significantly altering conventional workflow.

Dr. Teoh showed how the robotic arms could grasp and mobilize the tumor to provide stable traction and maintain consistent exposure of the dissection plane during resection. He emphasized that the platform was specifically designed to improve stability and maneuverability in difficult tumor locations while allowing the surgeon to perform precise en-bloc dissection under controlled visualization.


Importantly, Dr. Teoh proudly presented his team’s first human robotic transurethral en-bloc TURBT cases, all of which were completed successfully. Early clinical experience demonstrated the feasibility of the system, with successful en-bloc tumor removal, excellent specimen quality, and adequate detrusor muscle sampling. He highlighted that the robotic-assisted system appeared particularly beneficial in difficult tumor locations where conventional endoscopic instruments may have limited maneuverability or stability during dissection. Dr. Teoh also noted that the platform may help lower the technical barrier of en-bloc TURBT, potentially enabling urologists without prior experience in conventional en-bloc techniques to successfully perform the procedure.


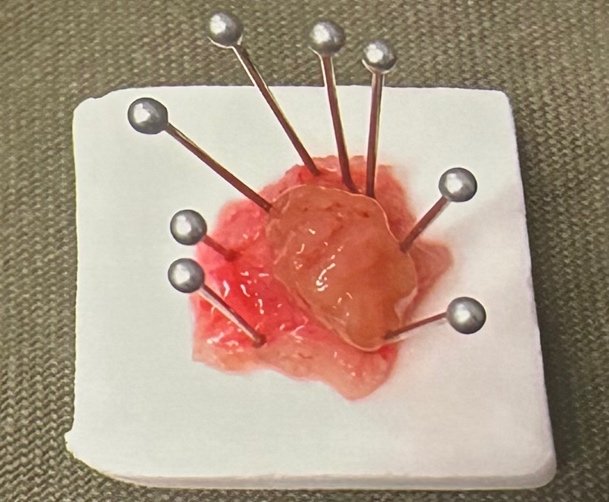
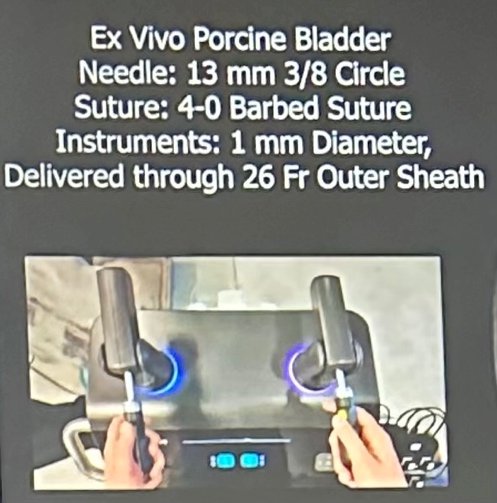
Beyond tumor resection, Dr. Teoh discussed the future potential of the robotic platform. One of the most notable future applications presented was the addition of a suturing capability, during which he demonstrated endoscopic robotic suturing that illustrated the potential for transurethral robotic surgery to expand beyond tumor resection alone. He highlighted how this capability may eventually enable more advanced reconstructive endoscopic procedures within the bladder and emphasized that the future possibilities of transurethral robotic surgery are likely far beyond current applications.
In his concluding remarks, Dr. Teoh stated that the “transurethral robotic platform is the next breakthrough in robotic surgery,” reinforcing his vision that continued innovation in transurethral robotics may bring meaningful clinical value to the future management of urologic diseases.

In summary, the presentation challenged the traditional paradigm of bladder tumor resection and showcased how robotic-assisted transurethral surgery may represent an important next step in the evolution of en-bloc TURBT and minimally invasive bladder cancer surgery. Importantly, the successful completion of the team’s first human robotic transurethral en-bloc TURBT cases provided early clinical evidence supporting the feasibility and promising potential of this emerging technology.
Presented by: Jeremy Teoh, The Chinese University of Hong Kong, Hong Kong
Written by: Kantapon Tangwiwat MD, Research Fellow, Department of Urology, University of California Irvine, during the American Urological Association (AUA) 2026 Annual Meeting, Washington, DC, Fri, May 15 – Mon, May 18, 2026.