(UroToday.com) The 2024 American Urological Association Annual Meeting included a kidney cancer surgical therapy session featuring work from Dr. Ahmed Ghazi and colleagues from the Johns Hopkins Department of Urology presenting their evaluation of the clinical utility and impact of IRIS™ as a means of preoperative surgical planning and navigation during robotic-assisted partial nephrectomy (RAPN).
IRIS™ is a 3D rendering of a patient's CT scan that you can view on any electronic device for preoperative planning or even utilize within the TilePro™ in the da Vinci robot for intraoperative navigation. IRIS™ allows you to pan, tilt, zoom, and even alter the transparency between the different structures so that you can better visualize the internal structures of the kidney (Figure 1).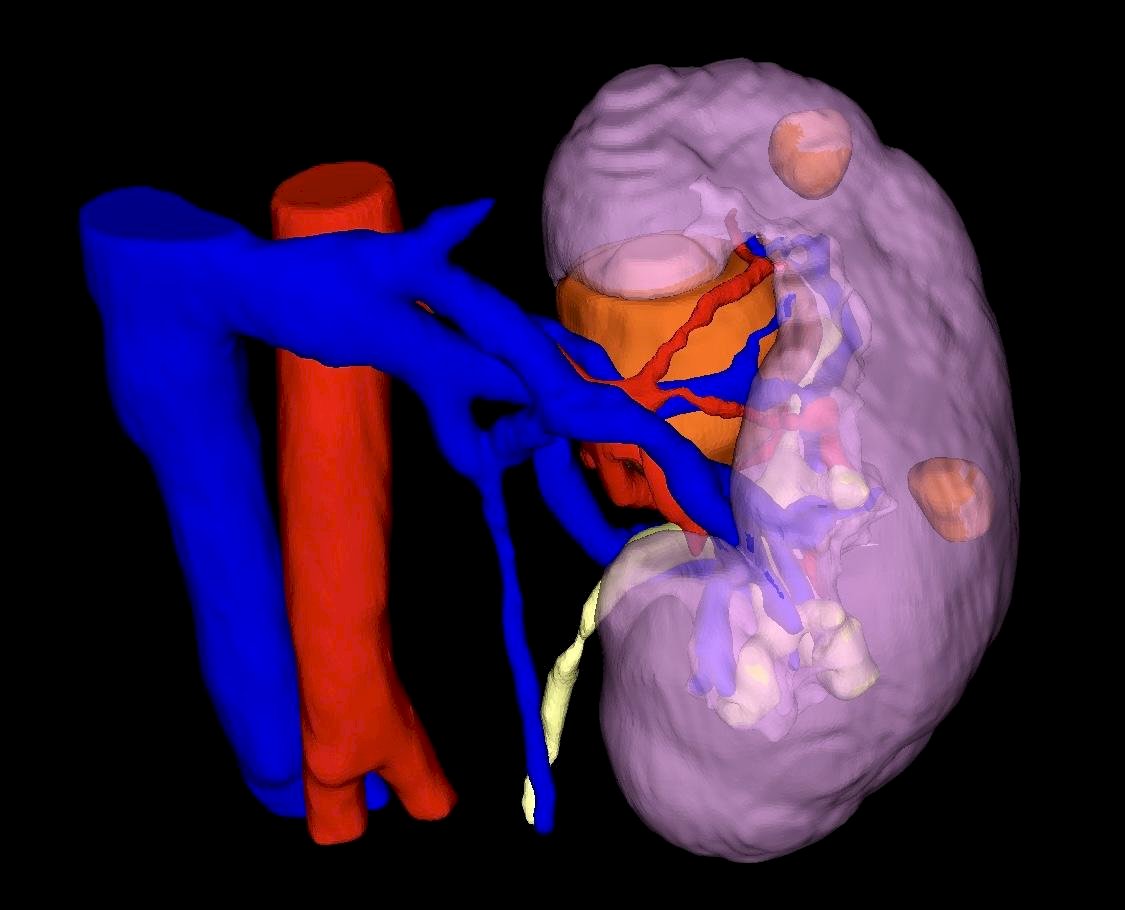
Figure 1: Sample IRIS™ 3D-model
In their study, 122 patients from two academic institutions, scheduled for RAPN, underwent preoperative surgical planning and intraoperative navigation; whereby 59 patients were represented by traditional CT scans, and the remaining 63 patients were represented by IRIS™ with CT scans. The team then collected demographic and intraoperative data for analysis. A 5-point Likert-type scale was used to assess the impact of either modality on anatomical interpretation, confidence in completing the procedure, and procedure efficiency (evaluated preoperatively and intraoperatively). The degree of overlap between the preoperative planned clamping and actual operative clamping was evaluated. Clinical data was then collected for 90 days post-surgery.
There was no significance seen in age, BMI, tumor size, RENAL score, or comorbidities. Dr. Ghazi also shared that there was no difference in operative time between the two groups. However, what they found was that the surgeons had the ability to interpret the information from the IRIS™ model more efficiently and with more ease. This was highlighted in the higher incidence of surgeons in the IRIS™ arm (98.4%) vs CT arm (77.9%) reporting confidence in successfully completing the planned RAPN procedure. Dr. Ghazi went on to explain that with this 3D model, they were able to see the relationship between tumor depth to the different parts of the kidney. Not only were the surgeons more confident in their execution of the RAPN, but this was also translated to a higher degree of execution in the IRIS™ arm (49.2%) vs the CT arm (8.47%) (Table 1). Additionally, it was noted that there was almost a 50-fold increase in amount of selective clamping as opposed to primary renal artery clamping in the CT arm (Table 2).
Table 1: Self-Reported Data from Surgeons in either the CT arm or IRIS™ arm.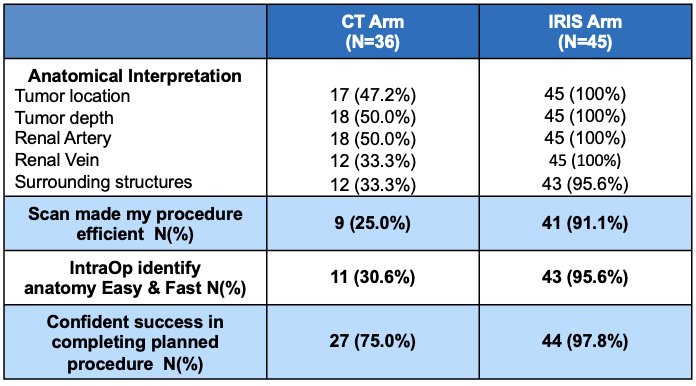
Table 2: Intraoperative Clamping Technique Utilized by the CT arm or IRIS™ arm.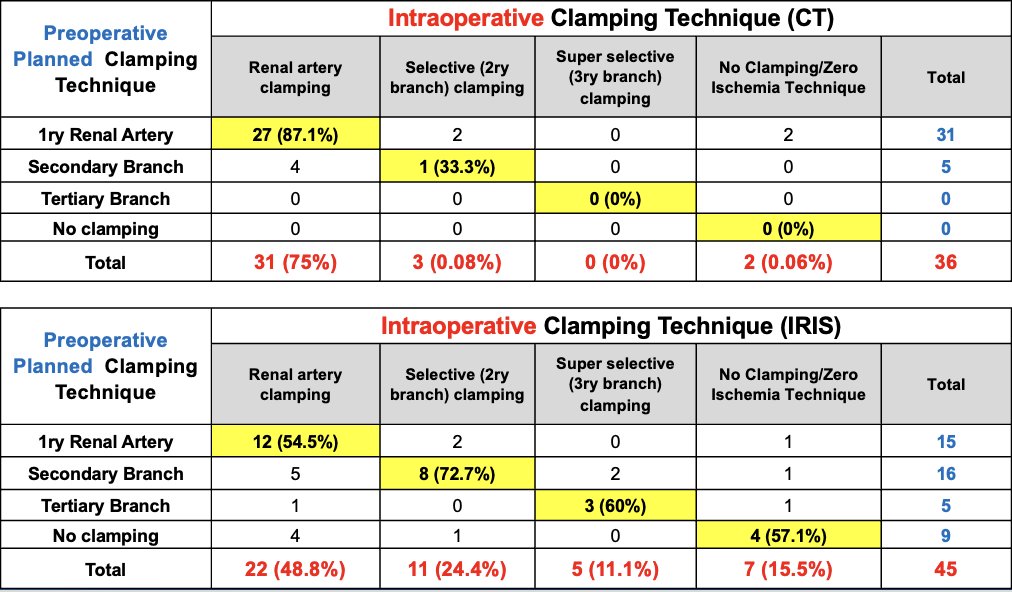
With this data, Dr. Ghazi concluded that the IRIS™ software improved self-report confidence, efficiency, and complex anatomical interpretation during complex RAPN cases seen by an increased implementation of non-global ischemia approaches.
This was certainly an impressive study from this session, and one of the attendees asked how it may compare to using an intraoperative ultrasound. Dr. Ghazi explained that it specifically helps with arterial identification and its relationship with the tumor. He goes on to say that an intraoperative ultrasound offers the dimensions of the tumor and the depth; however, with IRIS™, “you also understand how close is it abutting the pelvicalyceal system… Or is it invading the pelvicalyceal system?.. meaning you either have to cut out or amputate the calyx or just push it off like is usually seen”. This clearly highlights the potential added benefit to intraoperative planning. As such, many seemed eager to see how accessible this software is. In fact, one of the moderators of the session, Dr. William Huang asked what the cost of IRIS™ currently is and what the process looks like in coordinating CT scan rendering. Dr. Ghazi explained that there is a subscription service that comes with the DV5 that is integrated into the robot. CT scan rendering is possible by placing an order at the time of a clinic visit which then goes directly into the physician’s local PACS. Within 48 hours of that initial order, you have access to a 3D model that can show up on a phone or tablet, which can then be connected to the robot (Figure 2). In the future, people may expect the IRIS™ technology to have the ability to overlay the 3D model; per Dr. Ghazi, this is currently being worked on, but for now, that feature it is not currently available.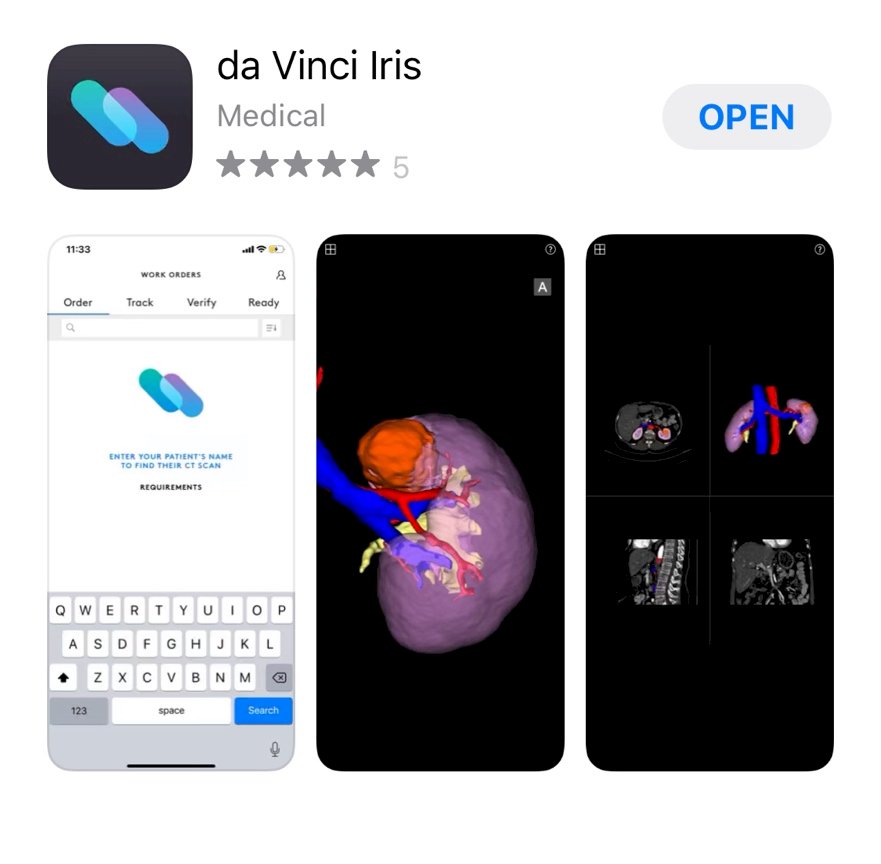
Figure 2: da Vinci Iris App as Currently Available for Download on any Tablet or Smartphone.
Presented by: Ahmed Ghazi, Associate Professor of Urology, Johns Hopkins University, Baltimore, MD
Written by: Amanda McCormac, Department of Urology, University of California Irvine, @MccormacAmanda on X during the 2024 American Urological Association (AUA) Annual Meeting, May 3 - 6, 2024, San Antonio, Texas